Práctica 3.1
Tipos de sensores:
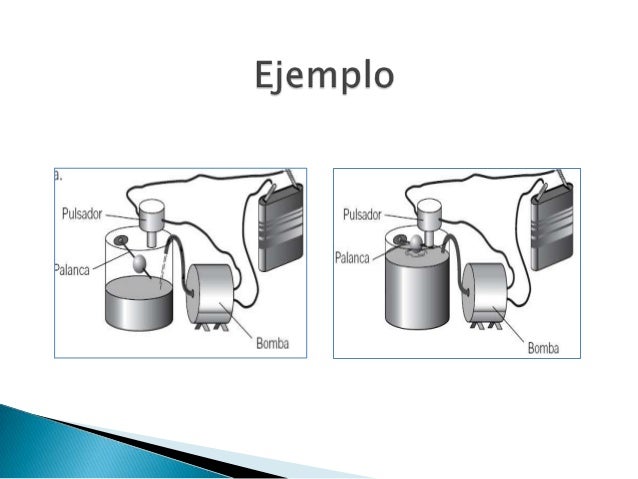

- De contacto: - Se emplean para detectar el final del recorrido o la posición límite de componentes mecánicos.
-Usos: saber cuando una puerta o una ventana que se abren automáticamente están ya completamente abiertas y por lo tanto el motor que las acciona debe pararse.
2. Sensores ópticos: -Detectan la presencia de una persona o de un objeto que interrumpen el haz de luz que le llega al sensor.
-Las LDR son muy útiles en robótica para regular el movimiento de los robots y detener su movimiento cuando van a tropezar con un obstáculo o bien disparar alguna alarma. También sirven para regular la iluminación artificial en función de la luz natural.
3. Sensores de temperatura : -trata de resistencias cuyo valor asciende con la temperatura (termistor PTC) o bien disminuye con la temperatura (termistor NTC).
 | |
- Uso:La principal aplicación de los sensores térmicos es, como es lógico, la regulación de sistemas de calefacción y aire acondicionado, además de las alarmas de protección contra incendios.
4.Sensores infrarrojos: -existe una franja de ondas electromagnéticas cuya frecuencia es muy baja para que nuestros ojos la detecten; son los infrarrojos
Comentarios
Publicar un comentario